- c'est une flèche qui va de A à B (A→B)
( je mets la flèche entre les deux car je ne peux pas la mettre au-dessus )
( je mets aussi les vecteurs en caractère gras : i, j, u, v, V ) - exemples (en physique) : la force, la vitesse, le déplacement
- On dit, pour le vecteur, son origine A et son extrémité B.
- si on échange les extrêmités, le vecteur change de signe : (A→B) = − (B→A)
- sa direction (la direction de la droite qui le porte)
- son sens (d'un côté ou de l'autre)
- son module (sa longueur = la distance AB)
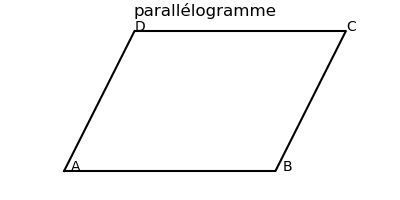
- on a : (A→B) = (D→C) ainsi que (B→C) = (A→D). (vérifier l'ordre des extrêmités sur une figure)
ou bien : (A→B) = − (C→D) ainsi que (B→C) = − (D→A) - Inversement : si (A→B) = (D→C), alors ABCD est un parallélogramme
car les 2 côtés opposés sont parallèles et égaux.
ou bien si (B→C) = (A→D), alors ABCD est un parallélogramme
une seule des 2 conditions suffit.
- addition :
Pour additionner 2 vecteurs, on les met bout à bout : A→B + B→C = A→C (relation de Chasles) - produit par un nombre (on dit aussi un scalaire) :
3 (A→B) = (A→B) + (A→B) + (A→B) (mis bout-à-bout)
direction : k (A→B) ne change pas la direction du vecteur (A→B)
sens : k (A→B) : si k > 0 : ne change pas le sens du vecteur (A→B) ; si k < 0 : retourne le vecteur
module : k (A→B) a pour module : |k| × AB
- Base du plan : une origine O et 2 vecteurs i et j (qui ne sont pas colinéaires)
coordonnées de l'origine : O=(0, 0)
V = x i + y j avec les coordonnées : V = (x, y) dans la base (O, i, j) - Addition de 2 vecteurs :
V1=(x1, y1) et V2=(x2, y2)
V1 + V2 = (x1+x2, y1+y2)
soit : V1 + V2 = (x1+x2) i + (y1+y2) j - Multiplication par un scalaire (réel) a ∈ R : a V = (ax, ay) = (ax) i + (ay) j
vecteur opposé : V × (−1) = −V = (−x, −y)
vecteur nul : V × 0 = 0 (vecteur 0)
- (A→B) = (xB − xA) i
+ (yB − yA) j
( abscisse de l'extrêmité − abscisse de l'origine ) ← à apprendre par coeur !
toujours : extrêmité − origine : A→B = B − A
d'où (A→B) + (B→C) =B− A + C −B= C − A = (A→C)
remarque : point A = (O→A)
| Soit, en coordonnées, en éliminant k : |
x' | = k x | × (−y) |
| y' | = k y | × x | |
| x y' − y x' | = 0 |
- i perpendiculaire à j (ortho)
- i et j sont tous les deux de longueur 1 (ou unité) (ou normé)
- Alors la longueur (ou module) du vecteur V=(x, y) est :
V = √x2 + y2
(d'après le théorème de Pythagore)
- tracer les points ainsi que le vecteur A→B
- calculer les coordonnées du vecteur A→B ? réponse
- calculer son module ? réponse (on peut appliquer cette formule car la base est orthonormée)
- Soit le vecteur V=(2,4), calculer le vecteur A→B + V ? réponse
- trouver le point C tel que A→C = V ? réponse
- trouver le point D tel que O→D = 3 A→B ? réponse
- vérifier que A→B et O→D sont colinéaires ? réponse